| 專利名稱 | 一種氣動式蛇形軟體機器人 | ||
|---|---|---|---|
| 申請號/專利號 | CN202411515541.8 | 專利權人(第一權利人) | 北華大學 |
| 申請日 | 2024-10-29 | 授權日 | 2025-01-14 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 高端裝備制造 |
| 技術主題 | 腳支撐|機器人技術|物理學|模塊化結構|類機器人 | ||
| 應用領域 | 程序控制機械手 | ||
| 意向價格 | 具體面議 | ||
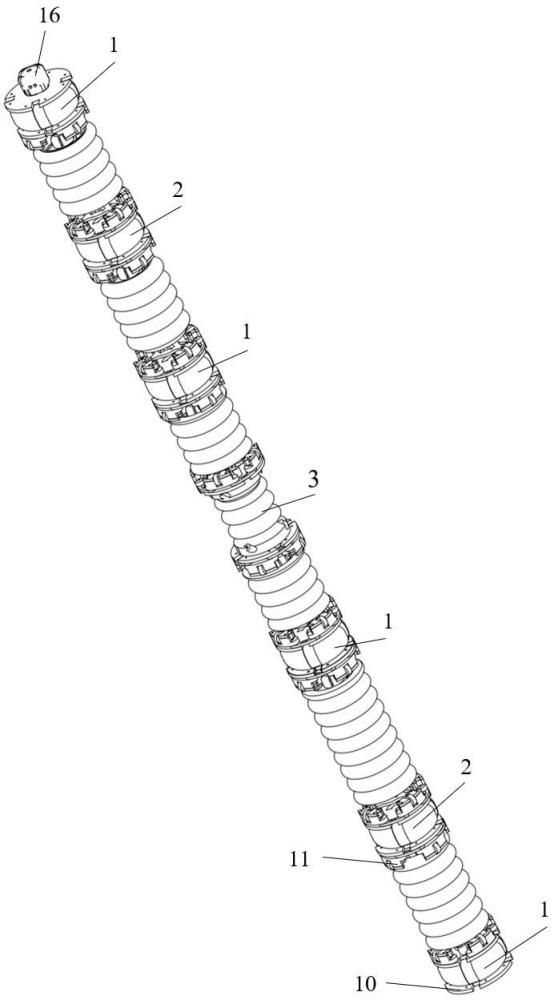
| 專利概述 | 本發明涉及機器人技術領域,具體為一種氣動式蛇形軟體機器人,包括:錨固足單元、支撐足單元、軀體、電磁換向模塊、供壓模塊、換向控制模塊、過載保護模塊、中央控制單元、供電模塊、足支架組件、軀體支架以及球鉸支座,本發明的軟體機器人采用串聯式的模塊化設計,通過球鉸支座將電磁換向模塊、供壓模塊、換向控制模塊、過載保護模塊、中央控制單元和供電模塊由前至后依次串接于各錨固足、支撐足和軀體之間,組成了串聯的模塊化結構,串聯式設計使各個模塊相互獨立又相互聯系,同時便于添加新功能模塊以適應新的工作需求。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |